

挑戰惡劣飛行環境,千巡翼X8在天山北麓的航測"實戰"
常年大風、地形復雜、飛行環境惡劣,這是新疆天山北麓東端,準噶爾盆地東南緣的一座大型露天煤礦情況,礦區管理者為進行智慧礦山建設,需要為礦區采集點云精度5厘米以內的三維數據成果。
難度大、風險高,什么樣的航測方案能“拿下”這個項目?
千巡翼X8多旋翼無人機搭載QX-1845R激光雷達執行的航測作業,就高效、安全地完成了此次數據采集任務。

它是如何做到的?下文將揭秘這座露天煤礦的三維實景航測項目實踐歷程。
項目背景
傳統測量手段效率低、成本高且有安全風險,同時數據成果單一,無法滿足智慧礦山數據管理需求。本項目通過無人機航測應用于露天礦山地形地貌測量、土石方量的計量等場景,生成高精度三維數據成果,幫助礦區管理人員精準獲取礦坑開挖程度、計算開挖量以及礦山儲量數據等,保障采礦規劃安全高效進行。

設備選型
由于地處新疆東北部,氣候干旱、常年大風,被測礦區的飛行環境惡劣,而客戶卻要求點云精度在5cm以內,這就要求航測方案所選用的無人機具備較強的抗風性、可靠性、穩定性,同時數據采集需要具備較高精度。
千巡翼X8是為航測領域優化打造的大載荷多旋翼飛行平臺,以往的最佳“戰績”是,在海拔5000米地區,7級大風環境下,載重12.87公斤依然能夠安全作業。它擁有雙天線差分定向、雙重避障能力,輕松應對強磁干擾和測區障礙;90分鐘飛行時間滿足大面積航測的“硬性”條件。此外,它還具備超大負載,兼容多種載荷能力,可以靈活選用激光雷達。QX-1845R激光雷達最大測程1845米,實現全天候、高效率三維點云數據獲取。兩者搭配,順利完成本次航測“實戰”。
方案優勢
1.高精度定位服務能力:基于千尋位置高精度定位服務能力,千巡翼X8無人機實現厘米級導航。獨有的電離層抑制能力加持,使得其定位更加精準、軌跡解算精度更加準確、點云數據質量更高。
2.高穩定性飛行平臺:千巡翼X8無人機采用高可靠安全飛控,具備3度冗余備份,雙天線差分定向,配置前視避障模塊和大視角高清晰FPV圖傳。最大起飛重量26.5kg,最大載重13.5kg,具備斷點續飛、仿地飛行等能力,可以適應各種復雜作業環境。
3.高性能機載激光雷達:QX-1845R激光雷達高度集成高性能激光器、高精度POS系統、全畫幅正射相機、高穩定數控系統。與千巡翼X8無人機搭配,可滿足1:500高精度測量作業。
4.一站式軟件服務:航線規劃軟件支持精準仿地/仿線三維航線、支持航線高程檢查;激光雷達系統具備工程管理、設備控制、基站標定、顯控編輯、一鍵航跡解算、免空三一鍵真彩賦色、點云預處理、質檢、點云分類、方量計算、斷面提取等功能。

技術流程本次作業采用的激光雷達系統,技術流程分為需求分析與計劃制定、航飛實施、點云預處理、點云后處理四大步驟。
外業飛行根據測區情況,設置相對航高300m,航速7m/s,航間距200m,爬升角(飛控自動計算)。無需架設基站即可作業飛行,簡單高效。

內業處理激光雷達系統為高效、便捷、高精度數據采集與成果輸出提供一站式服務。
本次作業點云生產時間花費13分鐘(雷達原始數據RXP轉SDC為11分鐘,從SDC生成到LAS點云2分鐘)。

數據處理流程
01首先使用FindTrace解算GIPPK,輸出out文件。
02使用QX-PCP軟件進行點云預處理。
03文件自動整理
04坐標系選擇
05任務航線時間段選擇
06設置濾波參數生成點云
07使用QX-Scan進行點云分類數據成果圖片航帶重疊圖片真彩色點云圖片整體點云圖片局部點云圖片數字高程模型成果檢查圖片點云厚度3.3cm圖片地面點云密度38個點/平方米圖片點云高程中誤差優于5cm項目總結千巡翼X8無人機搭載QX-1845R激光雷達進行智慧礦山數據底板采集,獲取的點云數據符合預期要求。

從項目實踐中可以看出,千巡翼X8具備長航時、大載重、強抗風、自主飛行的特性,單架次作業效率高,同時QX-1845R激光雷達可以更為精準地獲取地面點,分鐘級點云處理得到las成果。通過地面點云生成的DEM,能夠更快地對比坡頂線與坡底線,更準確地生成地形圖,計算開挖方量,為礦坑生產管理提供快速精準的地形數據,助力智慧礦山建設。
聲明:以上內容來源于網絡文章轉載,轉自千尋位置行業應用文章,出于傳遞信息及學習之目的,不代表本網站的觀點、立場,本網站不對其真實性負責。
更多相關

為什么思拓力S3A被稱為“RTK界的小鋼炮”?
憶往昔 我扛著心愛的RTK 走進樹林里時 走到房角旁時 走到高壓塔下時 還有在項目檢查過程中 當假裝鎮定的我 點著手簿屏幕時 卻…… 突然死機了…… 難道就沒一款好用又不貴的R...

GPS系統4月6日將迎來新周期——全球定位系統“歸零”
4月6日過后,民眾日常生活中經常使用的全球定位系統GPS將迎來新周期。近日在舊金山召開的RSA美國信息安全大會上,有專家預測,舊GPS系統將在4月6日發生類似計算機千年蟲的錯誤;更有安全專家表示,...

中海達亮相2023中國移動全球合作伙伴大會
10月12日,2023中國移動全球合作伙伴大會在廣州保利世貿博覽館召開。本次活動以“算啟新程智享未來”為主題,重點展示中國移動全球合作伙伴在5G+、終端、數智城市等方面的新產品、新技術和新服務。作為...

使用全站儀測量前需要做哪些準備?
使用全站儀測量前需要做哪些準備?使用全站儀進行測量之前,需要進行一系列的準備工作,以確保測量的準確性和效率。以下是一些基本步驟:1.設備檢查:檢查全站儀是否完好無損,包括目鏡、物鏡、電池、數據存儲器...

自動設站程序幫您提高全站儀作業效率
自動設站程序幫您提高全站儀作業效率 針對有多個固定棱鏡已知點,頻繁反復搬站或環境昏暗設站,同時測量精度要求較高的應用場景,全站儀采用傳統的設站方式會有如下問題: 夜晚黑暗環境設站放樣,棱鏡沒有...
全站儀測回法,快來了解一下!
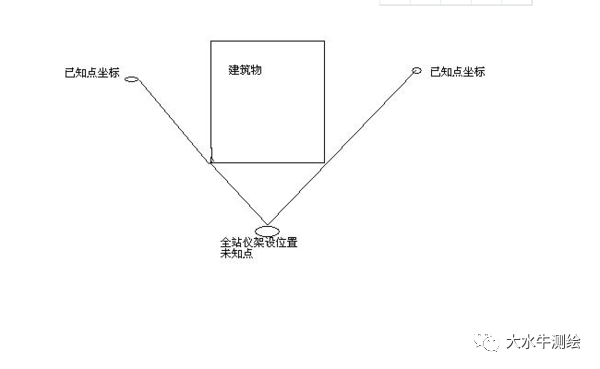
全站儀測回法是一種常用的測量方法,用于確定某個點的空間坐標。該方法需要在測量點附近設置兩個已知坐標的控制點,通過全站儀在測量點和控制點之間進行多次測量,最終計算出測量點的坐標。具體步驟如下:1.設置...

南京啟用“精靚系統”北斗/GPS定位,電子圍欄保障秦淮燈會順利舉辦!
每年的元宵節,去夫子廟賞燈的市民和游客總是人山人海。今年南京城管啟用了“精靚系統”,通過北斗/GPS定位、4G圖傳、“電子圍欄”、“電子考勤”、“巡更觸碰”、“區域預警”等信息化手段,為燈會保駕護...

微傾式水準儀、自動安平水準儀和電子水準儀使用方法!
一、水準測量原理 工程上常用的高程測量方法有幾何水準測量、三角高程測量、GPS測高及在特定對象和條件下采用的物理高程測量,其中幾何水準測量是目前高程測量中精度最高、應用最普遍的測量方法。水準測量...
 環球測繪微信
環球測繪微信